 “Is it an animal? Is it an insect?”. The answer is neither. In fact it is my version of a ‘robot walker’ in android using Box2D & AndEngine. I got interested in this simulation after I saw the Theo Jansen walker in JBox2D (look under Joints) . I did take a look at the code for this but I found it difficult to follow so I made my own version of a robot walker.
“Is it an animal? Is it an insect?”. The answer is neither. In fact it is my version of a ‘robot walker’ in android using Box2D & AndEngine. I got interested in this simulation after I saw the Theo Jansen walker in JBox2D (look under Joints) . I did take a look at the code for this but I found it difficult to follow so I made my own version of a robot walker.
With the above the robot walker is able to walk awkwardly as seen in the video clip on Youtube – Robot Walker in Android
The entire project can be cloned at GitHub at RobotWalker
In this connection I would like to point yot to an excellent and a fascinating TED talk by the creator Theo Jansen himself on “My creations, a new form of life”. His creations are really jaw- dropping.
Anyway getting back to my post I thought about what would make the insect walk? After some thought I realized that I had to create a swinging motion of the upper part of the leg combined with the lower leg motion which does not bend that much.
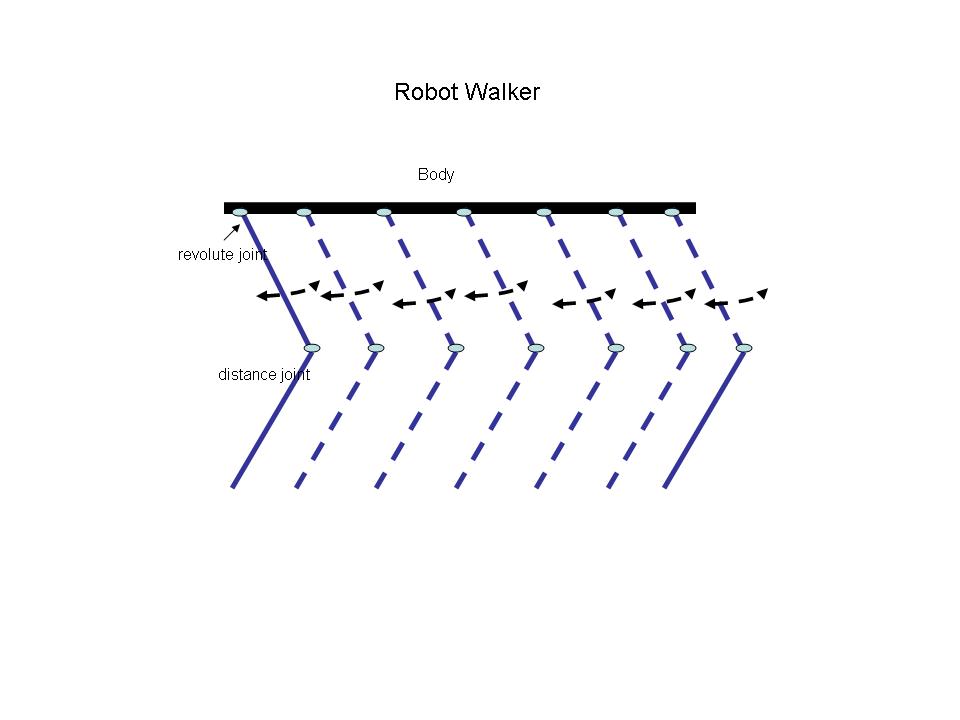
So I created a robot body which is a flat rectangular shape
Create the robot body
robot = new Sprite(100, 360, this.mRobotTextureRegion, this.getVertexBufferObjectManager());
robotBody = PhysicsFactory.createBoxBody(this.mPhysicsWorld, robot, BodyType.DynamicBody, BODY_FIXTURE_DEF);
this.mPhysicsWorld.registerPhysicsConnector(new PhysicsConnector(robot, robotBody, true, true));
this.mScene.attachChild(robot);
Creating legs
Then I create 6 different legs spaced apart
createLeg(100,360,1);
createLeg(120,360,1);
createLeg(140,360,1);
createLeg(160,360,1);
createLeg(180,360,1);
createLeg(200,360,1);
createLeg(220,360,1);
createLeg(240,360,1);
The createLeg() creates an upper and lower part of the leg. The upper part of the leg is connected to the body of the robot through a revoluteJoint as follows
Upper Leg
// Create upper leg
upperLeg = new Sprite(x, y, this.mLegTextureRegion, this.getVertexBufferObjectManager());
upperLegBody = PhysicsFactory.createBoxBody(this.mPhysicsWorld, upperLeg, BodyType.DynamicBody, LEG_FIXTURE_DEF);
this.mPhysicsWorld.registerPhysicsConnector(new PhysicsConnector(upperLeg, upperLegBody, true, true));
this.mScene.attachChild(upperLeg);
//Create an anchor/pivot at the body of the robot
Vector2 anchor1 = new Vector2(x/PIXEL_TO_METER_RATIO_DEFAULT,y/PIXEL_TO_METER_RATIO_DEFAULT);
//Attach upper leg to the body using a revolute joint with a motor
final RevoluteJointDef rJointDef = new RevoluteJointDef();
rJointDef.initialize(upperLegBody, robotBody, anchor1);
rJointDef.enableMotor = true;
rJointDef.enableLimit = true;
rJoint = (RevoluteJoint) this.mPhysicsWorld.createJoint(rJointDef);
Lower Leg
The lower leg is connected to upper leg through a distance joint
// Create lower leg
lowerLeg= new Sprite(x, (y+50), this.mLegTextureRegion, this.getVertexBufferObjectManager());
lowerLegBody = PhysicsFactory.createBoxBody(this.mPhysicsWorld, lowerLeg, BodyType.DynamicBody, LEG_FIXTURE_DEF);
this.mPhysicsWorld.registerPhysicsConnector(new PhysicsConnector(lowerLeg, lowerLegBody, true, true));
this.mScene.attachChild(lowerLeg);
// Connect the lower and upper leg with distance joint
Vector2 anchor2 = new Vector2(x/PIXEL_TO_METER_RATIO_DEFAULT, (y+50)/PIXEL_TO_METER_RATIO_DEFAULT);
//Create a distanceJoint between upper & lower leg
DistanceJointDef distanceJoint1 = new DistanceJointDef();
distanceJoint1.initialize(upperLegBody,lowerLegBody, anchor2,anchor2);
distanceJoint1.collideConnected = true;
distanceJoint1.dampingRatio = 0.5f;
distanceJoint1.frequencyHz = 10.0f;
this.mPhysicsWorld.createJoint(distanceJoint1);

Creating a walking movement
To create a walking movement I create a timer task which triggers after a delay of 1 second periodically and makes the upper legs’s revoluteJoint swing between angles within an upper and lower limit.
new IntervalTimer(secs,rJoint);
The timer itself reverses the motor every time it fires
class RemindTask extends TimerTask {
RevoluteJoint rj1;;
RemindTask(RevoluteJoint rj){
rj1 = rj;
}
@Override
publicvoid run() {
reverseMotor();
}
publicvoid reverseMotor(){
rj1.setMotorSpeed(-(rj1.getMotorSpeed()));
rj1.setMaxMotorTorque(10);
}
}
With the above the robot walker is able to walk awkwardly as seen in the video Robot Walker in Android
The entire project can be cloned at GitHub at RobotWalker
I will probably be refining this sometime in the future. One good idea is to create a delay between the swings of different legs. Any thoughts suggestions on making the movement more fluid are more than welcome.
Take a look at some cool simulations using AndEngine & Box2D
1. Simulating the domino effect using Box2D and AndEngine
2. Bull in a china shop – Behind the scenes in android
3. Creating a blob in Android using Box2D physics Engine & AndEngine
4. Blob with an attitude(stiffness) in Android
and a few more
Find me on Google+


6 thoughts on ““Is it an animal? Is it an insect?” in Android”